Algselt toodetud Inglise firma Nautech poolt 1973 aastal ja tuntud Autohelm nime all. Hiljem omandas Autohelmi kaubamärgi Raytheon ja sellest sai Raymarine mis toodab tänaseni selle algse 1973. aasta seadme tänapäevasemaid järeltulijaid. ST1000 / ST2000 seeria Tiller Pilot olnud üks maailma populaarseimad autopiloote pakkudes enneolematut töökindlust, jõudlust ja kasutusmugavust. ST2000 Plus pinnipiloodid on mõeldud purjepaatidele kaaluga kuni 4,500 kg. Kõige populaarsem ei tähenda siinkohal kõige parem, seda toodet tuleb võtta sellisena nagu ta on.
Tänu nutikatele funktsioonidele nagu AutoTack ja AutoSeastate on purjetamine veelgi lihtsam – piloot pöörab paati ja hoiab kurssi säästes samas energiat. LCD-ekraan koos 6-nupulise juhtpaneeliga muudab seadme intuitiivseks ja lihtsaks kasutada nii iseseisvalt kui ka koos SeaTalk/NMEA GPS-süsteemidega.
Omadused:
-
AutoTack-funktsioon võimaldab teha paute
-
AutoSeastate kohandub mereseisuga hoides kurssi ja vähendades energiakulu
-
Intuitiivne 6-nupuline juhtpaneel koos taustavalgustusega LCD-ekraaniga
-
Käsitsi ja automaatne seastate ja trimmi-funktsioon
-
Tuulekompensatsioon (WindTrim)
-
Kompassi kõrvalekallete automaatne korrektsioon
-
Kalibreeritav kasutaja eelistuste järgi
-
Suunakompenatsioon põhja/lõuna suunaliseks navigeerimiseks
-
Võimalik lisada kaugjuhtimispult ja väline kompass
-
Waypoint-uuenduse funktsioon marsruudil liikumiseks
Tehnilised andmed:
-
Maksimaalne paadi kaal: 4,500 kg (10,000 lb)
-
Tõukejõud: 77 kg (170 lb)
-
Sisseehitatud fluxgate-kompass
-
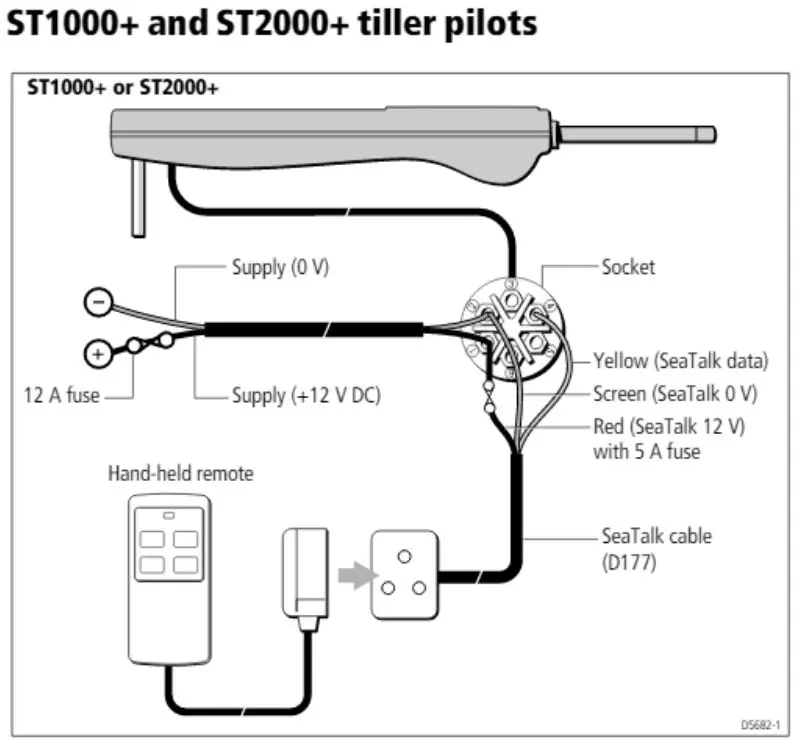
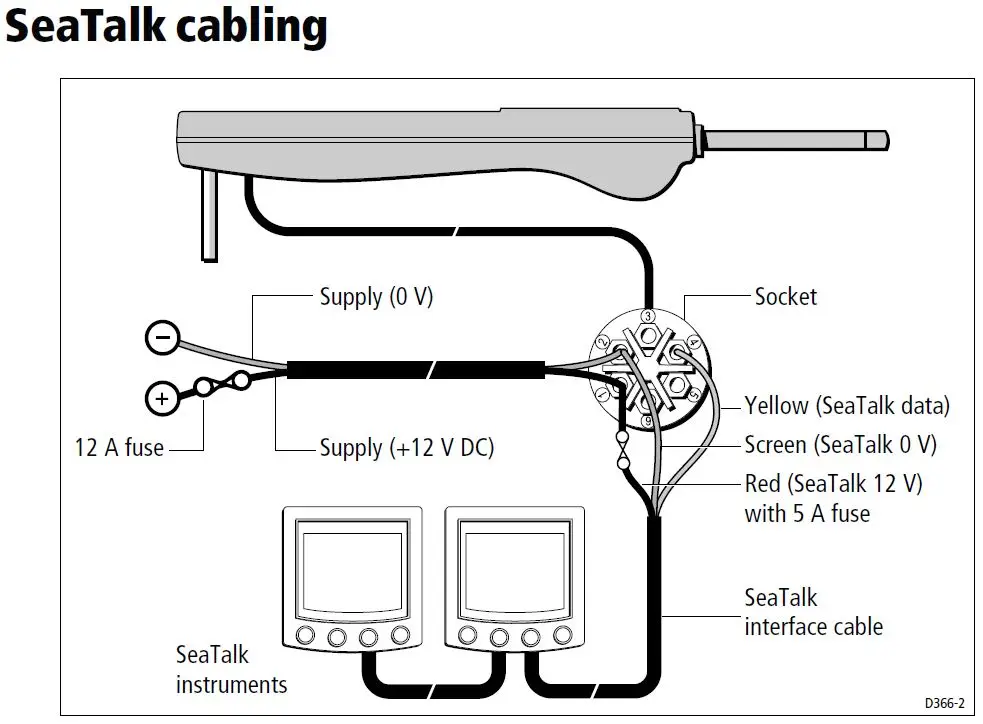
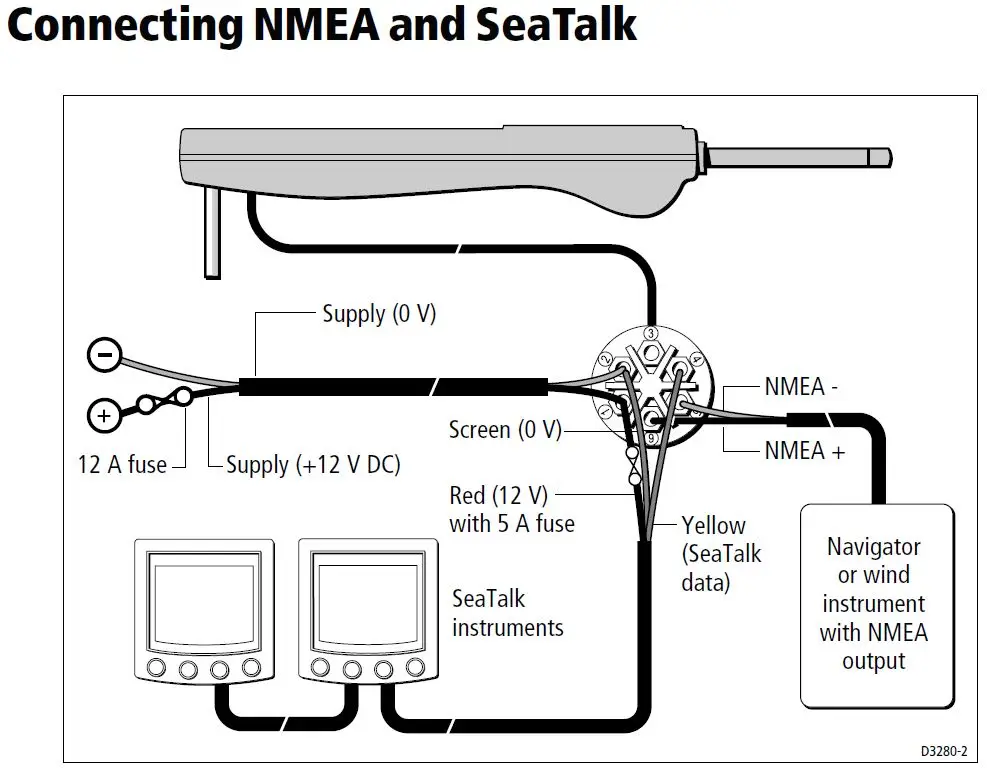
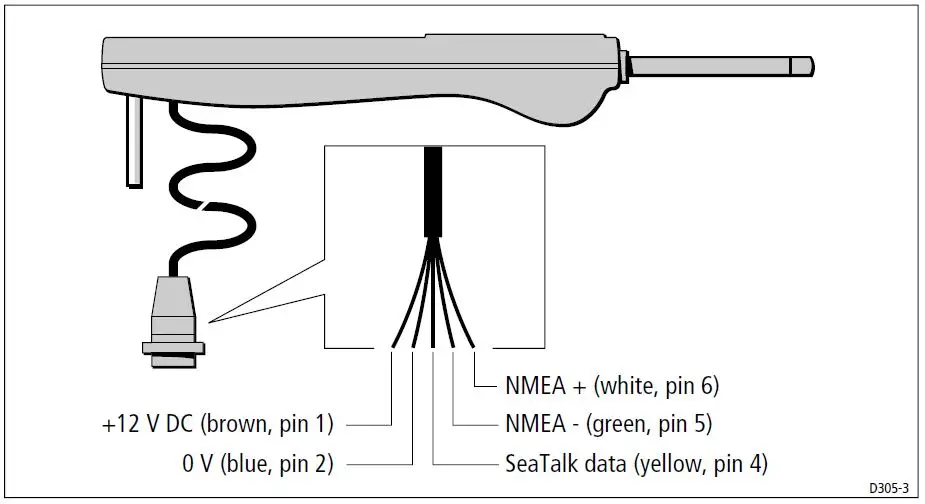
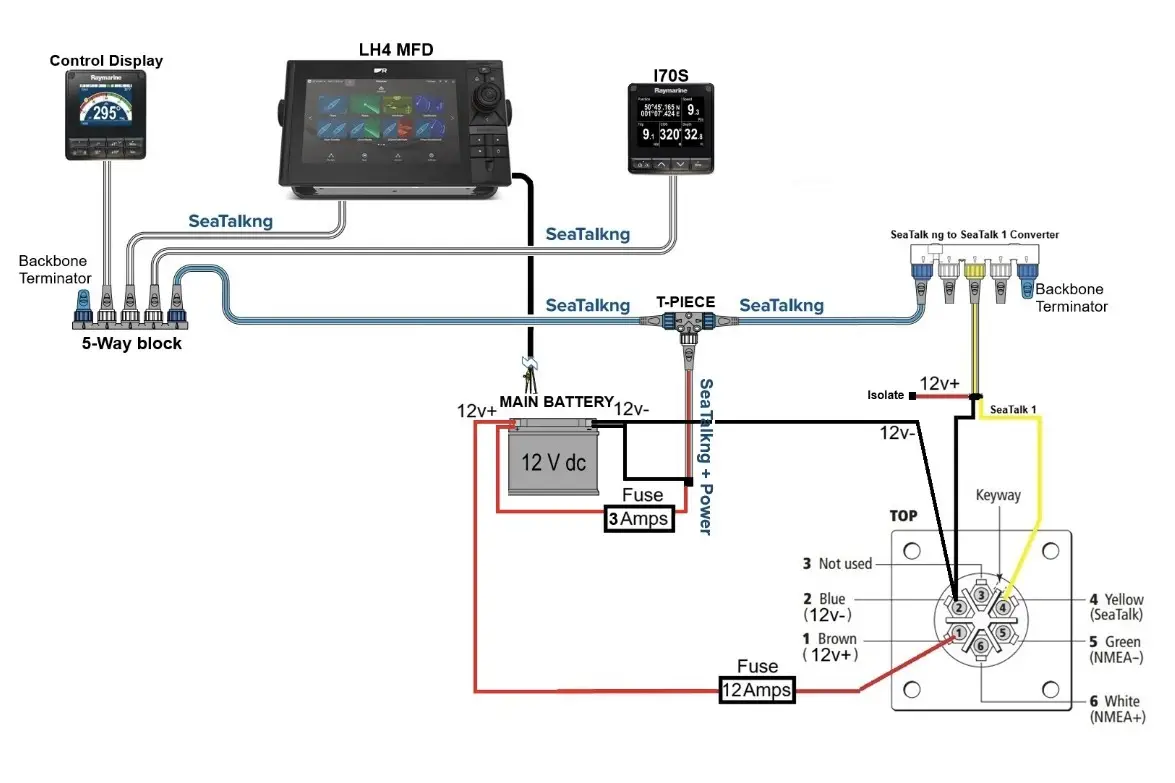
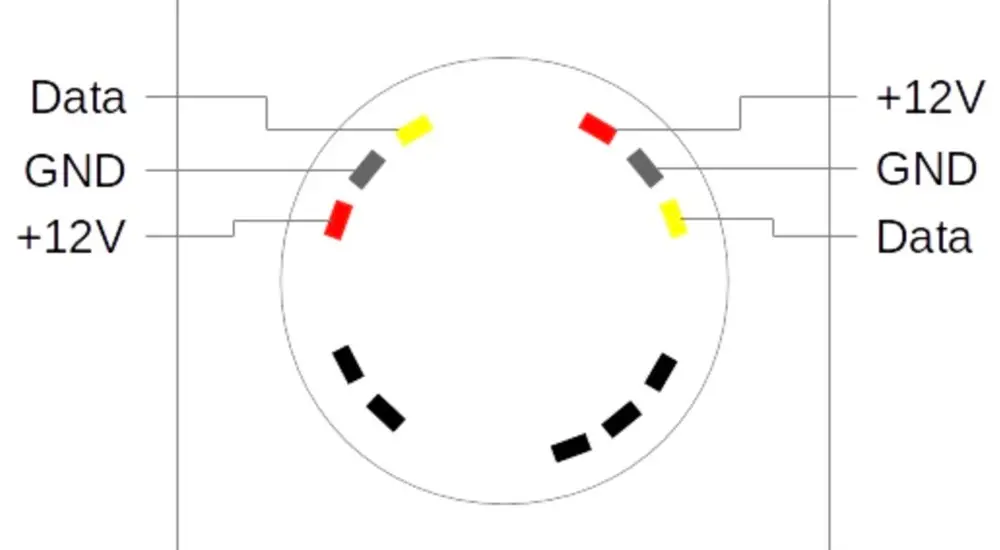
Ühendused: SeaTalk1 ja NMEA 0183 sisend
-
Toitepinge: 10 V – 15 V DC
-
Energiatarve: ooterežiimis 40 mA (täisvalgustusega 90 mA), töörežiimis 0.5–1.5 A
-
Töötemperatuur: 0°C kuni +70°C
-
Veekindel korpus
Raymarine Tiller Pilot on ideaalne kaaslane igale väiksemale purjejahile, mis vajab täpset ja töökindlat automaatset juhtimist.
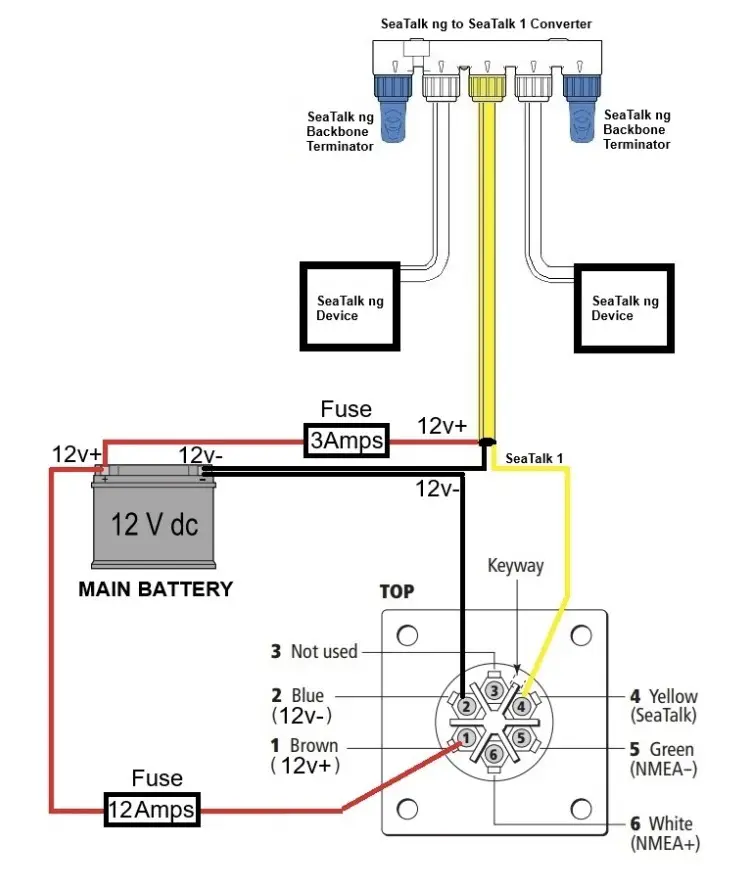
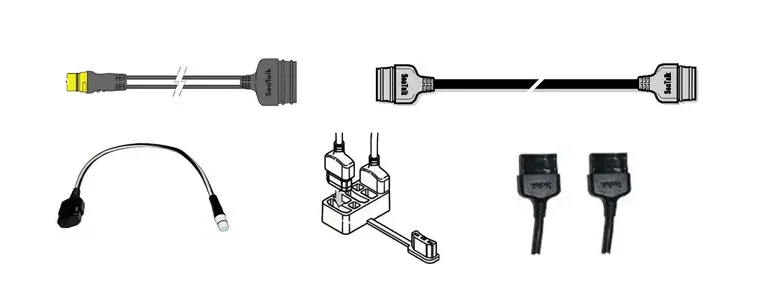
ST2000 Plus pinnipiloodi integreerimiseks uue STNG (NMEA2000) võrguga vajad Sa STNG > SeaTalk1 konverterit.
Saadaval on ka SeaTakl1 3-Way Junction Box ja SeaTakl1 kaabel.
Juhendid:













Arvustused
Tooteülevaateid veel ei ole.